Carleton University - School of Computer Science Honours Project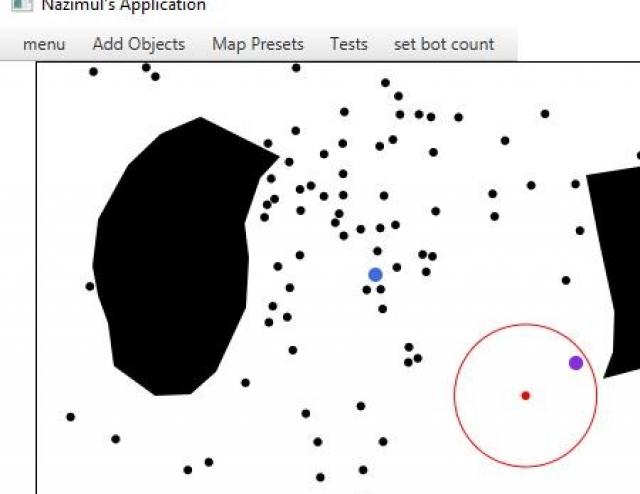
Fall 2019
Swarm Testing Framework for Finding Optimal Behavioral Patterns
ABSTRACT
It is a useful feature to have a robot be able to navigate an unknown environment and completely unsupervised, this is the goal of this project; to find optimal ways for robots to navigate their environment based on very simple set of rules. Keeping rules simple means that robots can be very unsophisticated while still managing to do their task. The task is to navigate an unknown environment to reach goal point on the map. Robots are completely ignorant of the environment layout, testing these strategies consistently is crucial. Testing would need to be done on a new framework which involves building the simulation where parameters can be modified at runtime and saved after completion. The main application is a sandbox that allows the user to add obstacles, robots and goals in real time. The app also contains preset tests that allow the user to implement and test their own strategies in that environment. The experiments were conducted individually for a certain type and number of robots per an experiment. By changing variables between experiments and comparing with a baseline: we can see differences in performance between normal ones and ones with modified strategies.