Carleton University - School of Computer Science Honours Project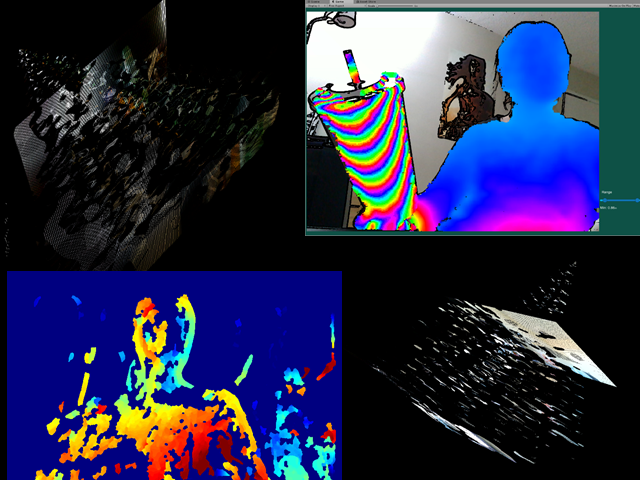
Winter 2020
VR headset Simulator of 3D reconstruction via Depth Camera and Stereo cameras
ABSTRACT
This project is divided into three stages.
Stage 1: Edge Coloring and Detecting Approaching Objects by Depth Camera
Stage 2: High Dynamic Range in Video Stream Implement by Three USB Cameras Stage
3: Stereo Cameras (Three USB Cameras) Implement Point Cloud: 3D reconstruction
Stage 3 is an evolution of the first two stages. Since this project must be connected to the camera to run (otherwise it will automatically quit), I will provide many videos for display.
The original intention of the project is to render pixels of the real scene through the camera attached to the VR headset to achieve visual enhancement. So, the initial plan was to use a Raspberry Pi in combination with a depth camera. Both of them are installed on a VR headset. However, due to insufficient power supply of the Raspberry Pi and it does not support many libraries, the project was simulated on the desktop.