Carleton University - School of Computer Science Honours Project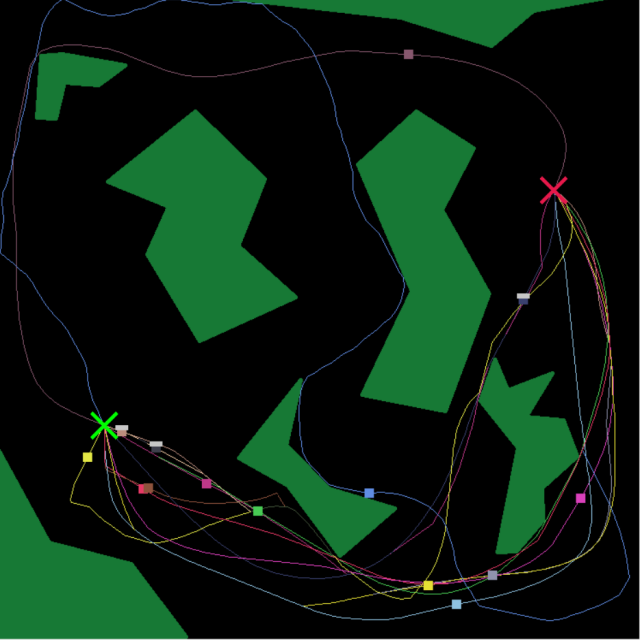
Winter 2020
Pathfinding with Swarm Robotics
ABSTRACT
Pathfinding is often done by a single, central computer that outputs the shortest path between two entities after the algorithm has finished. The primary motivation for this project is to explore a distributed and generative solution to the problem of path finding through the application of swarm robotics. Swarm robotics is the practice of using a group of robots to accomplish a specific task where the robots do not rely on a centralized control structure or complex external structure to aid them. These robots must rely on local interactions with each other and the environment to perform their task collectively. This project examines how to maximize the efficiency of applying a simulated robotic swarm to the problem of path discovery and path improvement through unknown environments.