Carleton University - School of Computer Science Honours Project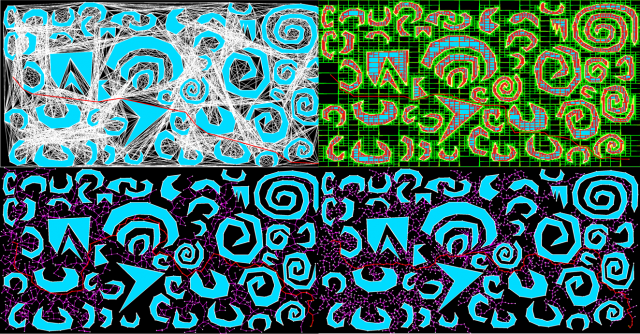
Summer 2021
2D Path Planning
ABSTRACT
Given that a robot is placed on the ground and tasked with the assignment of reaching a certain spot in the least amount of distance. How would this be achieved? To answer this question, the two main topics that will be discussed and researched in this report are algorithms that involve path planning and finding the shortest path given a source and a destination.
Path planning is a computational problem that allows for the configuration and creation of valid paths for an object to move from a source to a destination point. Although path planning is dominantly known in the fields of robotics applications, it also plays an important role in other fields such as network routing, video games (i.e., An enemy chasing you down through obstacles) and computational geometry.
Similarly, the shortest path problem is also a computation problem which tries to find the shortest path from a source to a destination with the least amount of weight used. (Weight in this case means the distance of each of valid path).
The main objective of this project was to develop a better understanding of some of the path planning and shortest path algorithms by researching and attempting to implement and visualize them.