Carleton University - School of Computer Science Honours Project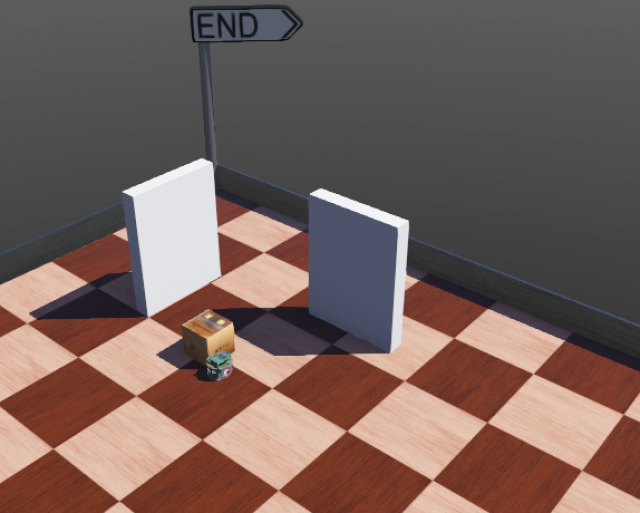
Summer 2021
Rigorous Object Transportation with Robots (Webots)
ABSTRACT
Perhaps the most important goal of robotics is to provide robots the ability to analyze, plan, and execute certain tasks without human intervention. The aim of this project is to construct a 3D simulation in which a team of robots rigorously push an object from point A to point B as efficiently as possible while avoiding obstacles along the way. The 3D environment and constructs the most efficient path from the target object to the desired destination. Upon finding the path, the simulation works to get the robot to transport the object to the required destination. This project will expand upon Pierre Chamoun’s thesis on Rigorous Movement of Convex Polygons by transforming his Java Swing based environment and custom built robots to the 3D Webots environment and robots