Carleton University - School of Computer Science Honours Project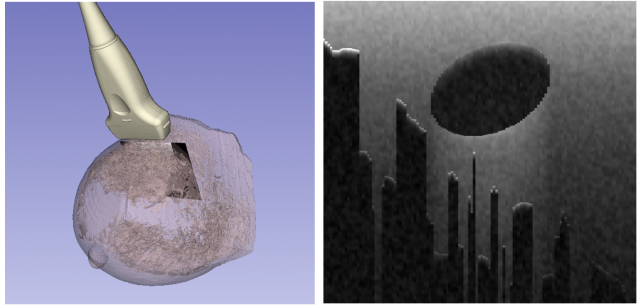
Winter 2024
Ultrasound-Guided Robotic Navigation for Breast Tumor Detection via Reinforcement Learning
ABSTRACT
Limited work has been done on examining deep learning for ultrasound robotic navigation, and there is no existing literature found that explores object detection
within an ultrasound-guided navigation environment. Our work addresses this gap by exploring a solution to automated, robotic breast tumor detection using
reinforcement learning. We are successfully able to train a multi-model agent for the task for breast tumor detection within a 3D Slicer simulated environment by combining deep Q-learning along with an image classifier, and a classification accuracy of 96% is obtained. Future work includes exploring more diverse simulation environments as well as investigating the effectiveness of simulation-to-real-world transfer learning